Towards Safe Autonomous Driving: Decision Making with Observation‑Robust Reinforcement Learning
中文:迈向安全的自动驾驶:基于观察稳健强化学习的决策
对抗代理
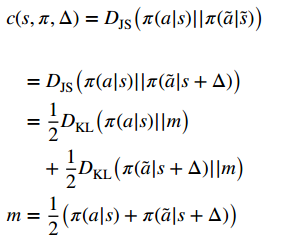
目标:最大化自动驾驶汽车策略的受扰动变异距离
通过JS散度来度量扰动策略的变化
自动驾驶代理
算法:Actor-Crtic
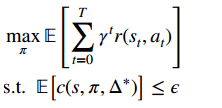
约束优化问题的拉格朗日对偶函数
Trustworthy autonomous driving via defense-aware robust reinforcement learning against worst-case observational perturbations
中文:通过防御感知的鲁棒强化学习应对最坏情况观测扰动,实现可靠的自动驾驶
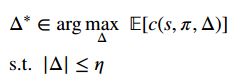
对抗代理
目标:最大化自动驾驶汽车行动成本函数

算法:乘法扰动(贝叶斯优化),加法扰动(FGSM)
自动驾驶代理
算法:Actor-Crtic
约束优化问题的拉格朗日对偶函数